My work on human balance has two goals
- Develop the most accurate methods to analyze human balance
- Apply these methods to study human balance
Additional details
For the most part, humans catch their balance by taking steps. If you can calculate where someone should place their feet you can measure the distance to their actual steps to analyze their balance. As a result, I have developed two models:
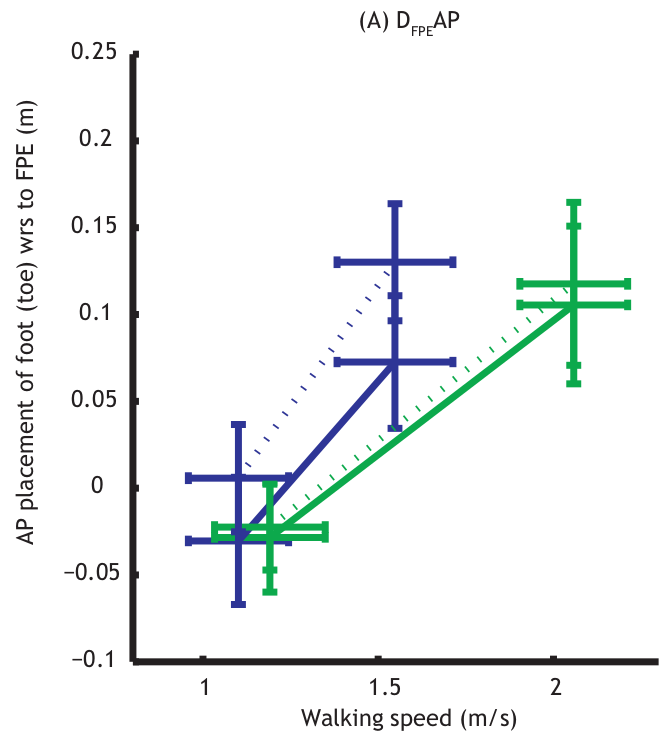
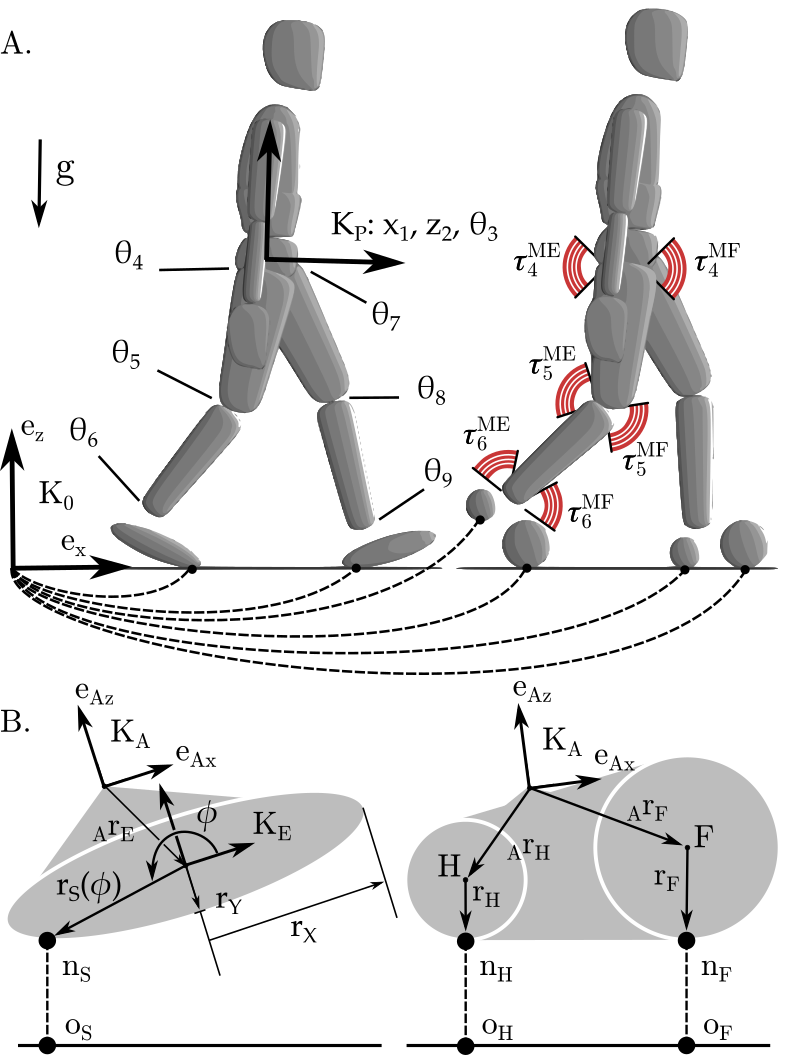
- balance model: 3-dimensional foot placement estimator (FPE3D) (paper) (code)
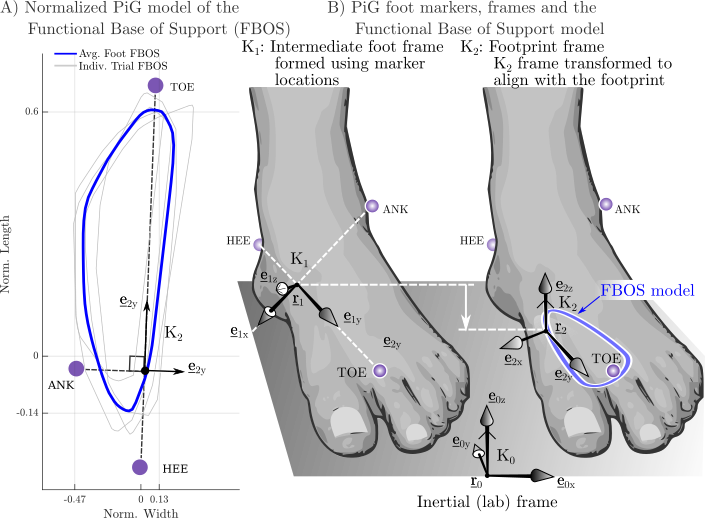
- foot model: functional base-of-support (fBOS) (paper) (code)
There are other models of foot placement and balance, such as the extrapolated center-of-mass (XcoM), so what differs here? The FPE3D:
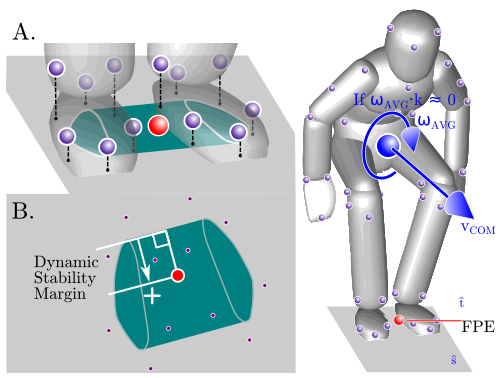
- includes all components of linear and angular momentum
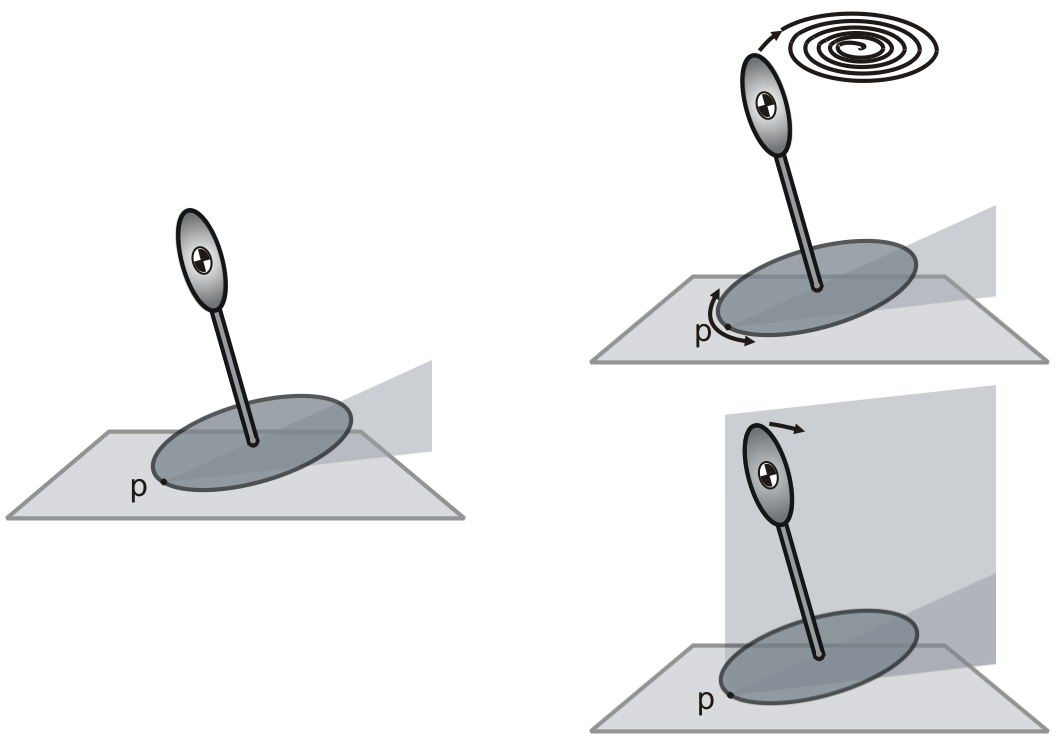
- assumes pendular trajectories for the center-of-mass
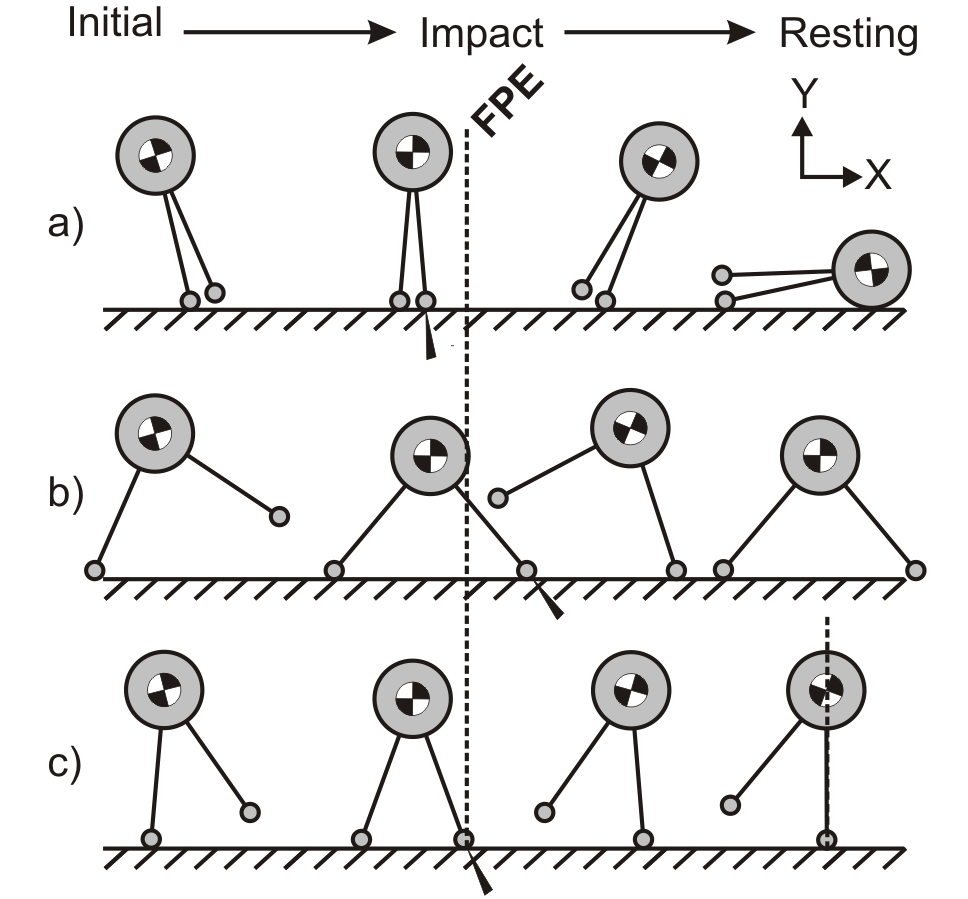
- assumes plastic and momentum-conserving foot-ground contact
When does this matter? These assumptions have been well met during every scenario that has been tested:
- walking
- cerebral palsy gait
- stopping
- turning
- sit-to-stand
- landing from a standing long jump
Further more, experimental work has shown that when someone steps on the FPE3D they can stop without taking another step. In contrast, when someone does not step on the FPE3D they must take another step.
The XcoM makes different assumptions and, as a result, loses accuracy when angular momentum is substantial (sit-to-stand), and when foot-ground impact is high (landing from a jump). Geometrically the differences can be as large as 15 cm, which is quite large given that functional size of the foot is of a similar size.
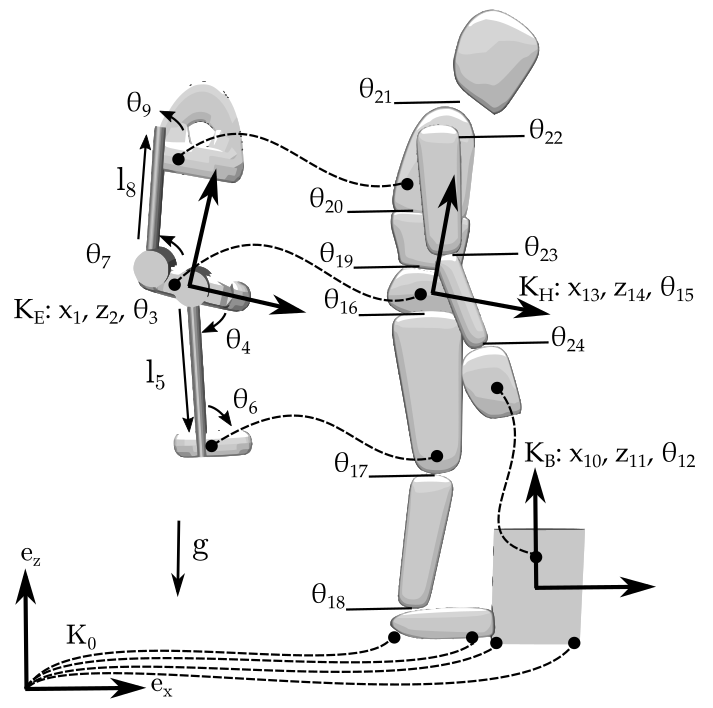
What does the model actually do?
The model transforms the movements of the entire body into a condition and location on the floor - the FPE3D. If the condition is met and the person can cover that location with their foot they can come to a stop, balancing over their foot, in a single step. The shortest distance between the functional area of their feet (fBOS) and the FPE3D is the dynamic margin of stability.
Getting started ...
-
Read Section 2.3 of
-
Clone and run these code bases
- 3 dimensional foot-placement estimator (FPE3D): Matlab code
- functional base-of-support (fBOS): (code)
-
And then start using the FPE3D and fBOS in your own work ...
- Note: A C++ implementation of the FPE3D exists as a part of RBDL: see CalculateFootPlacementEstimator in BalanceToolkit.h in rbdl/addons/balance.
Balance: mathematical details
Foot Placement and Balance in 3D (2012) (paper) (code)
See also Wight et al.'s Introduction of the foot placement estimator (2009) (paper) (pdf)
(back)Balance: experimental studies
The basis of balance analysis: the functional base of support provided by the human foot (in preparation) (code) (YouTube)
The increased step size stability assessment benchmark and its application to the humanoid robot REEM-C (2021). (paper) (pdf)
Slow but steady: similar sit-to-stand balance at seat-off in older vs. younger adults (2020) (paper) (code) (pdf)
Gait stability in children with cerebral palsy (2013) (paper) (pdf)
Human foot placement and balance in the sagittal plane (2009) (paper)(pdf)
(back)Muscle models serve to improve the accuracy of simulation, but are also a scientifically interesting topic in isolution.
Additional details
Muscular contraction has been a topic of research of the ancient Greeks, through the enlightenment, the industrial revolution, and right up until today. Much remains unknown about muscle. Studying muscle today can be extremely challenging: the smallest elements are measured in nanometers, while the largest barely reach micrometers.
As in physics, today both experiments and models are used to make further progress. Models are wonderful tools for evaluating the consequences of an idea, interpreting complex data, and for developing new ideas for experiments. Experiments, in turn, are absolutely necessary to provide the hard facts needed to make progress.
Basic science work in muscle physiology has had many practical impacts on society. A lot more is known about how conditions, such as cerebral palsy, affect the muscles and may lead to new treatments. Rehabilitation teams have the possiblity of predicting how an orthosis, such as an ankle-foot-orthoses, will affect the patent using physics-based simulation. Crash simulations are beginning to include the effects of active neck musculature to more accurately simulate whiplash. These are only the few applications in which I have been personally involved: the applications of basic science research of muscle are broad and far reaching.
Getting started ...
Muscle models are crafted for a specific purpose. Use this list to help guide your reading:
-
Multibody simulation:
- Cable muscles with elastic tendons
- VEXAT muscle model:
- A three filament ... (paper) (pdf)
- (Matlab code)
- Damped equilibrium muscle model
- Flexing Computational ... (paper)(pdf)
- (Matlab code)
- (OpenSim: see OpenSim/Actuators/Millard2012EquilibriumMuscle.h)
-
Finite element simulation
- Cable muscles with elastic tendons
- VEXAT muscle model
- A benchmark of muscle models ... (paper)(pdf)
- (benchmark code)
- (Fortran model code)
-
Optimal control
- Torque muscles with rigid tendons
- Optimization method to fit to experimental data
- A reduced muscle model (paper)
- (code: rbdl/addons/muscle)
Muscle: models
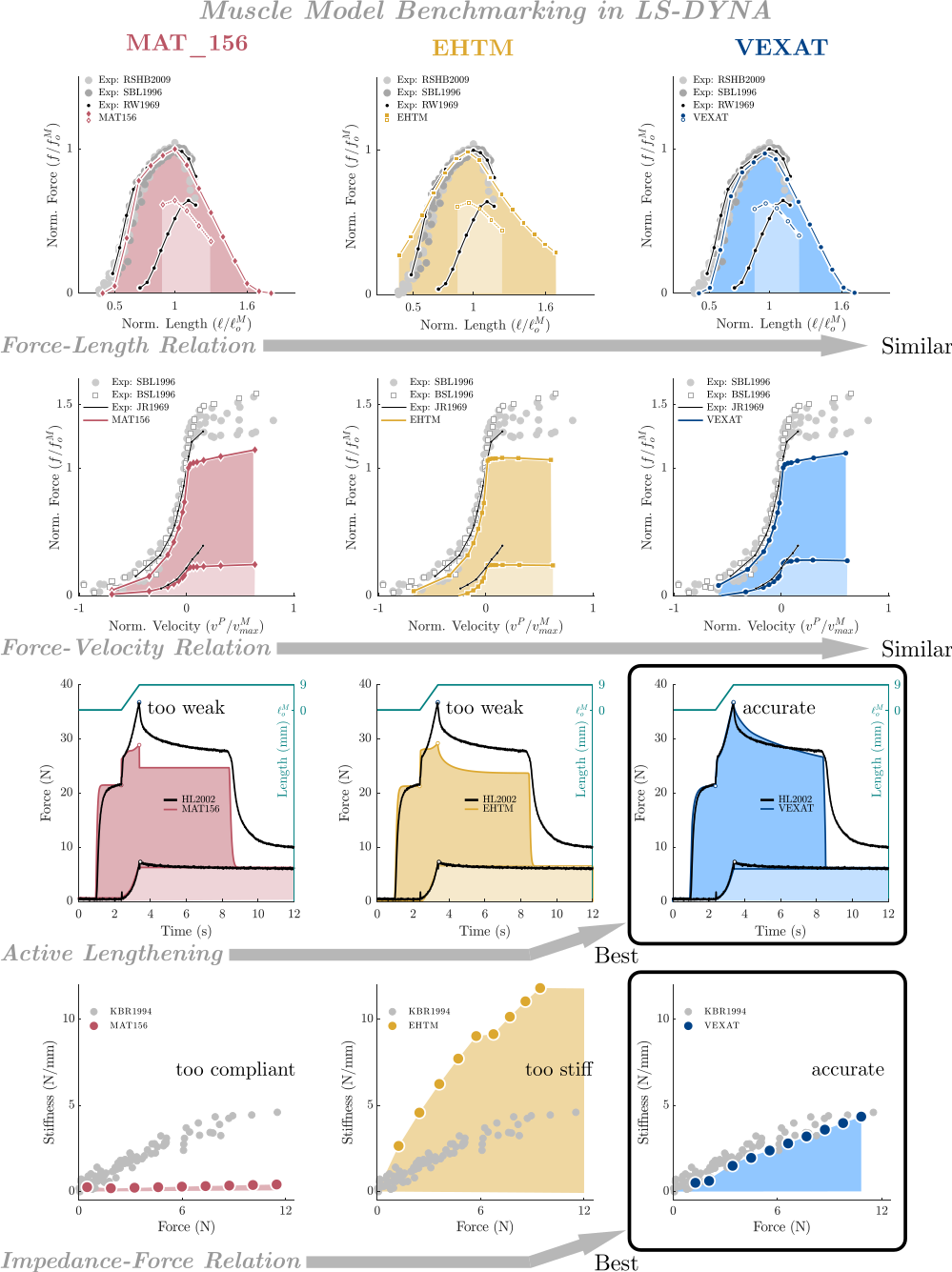
A benchmark of muscle models to length changes great and small (2024) (paper) (pdf) (benchmark code), (Fortran model code)
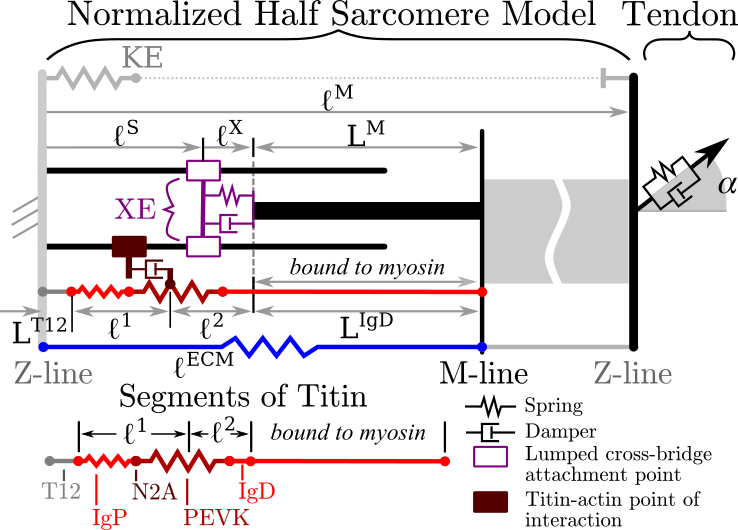
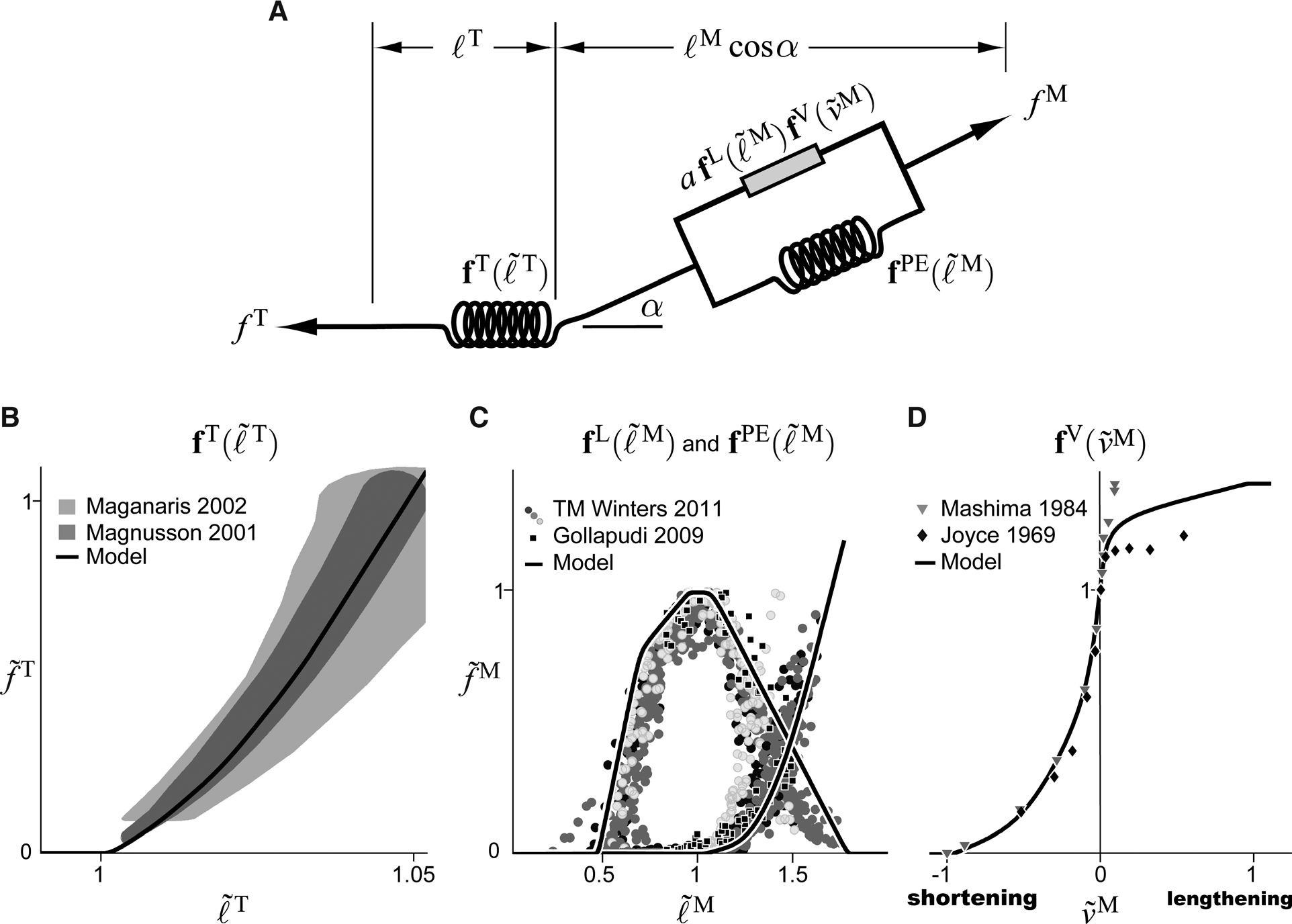
A three filament mechanistic model of musculotendon force and impedance (2024) (paper)(pdf)(Matlab code)
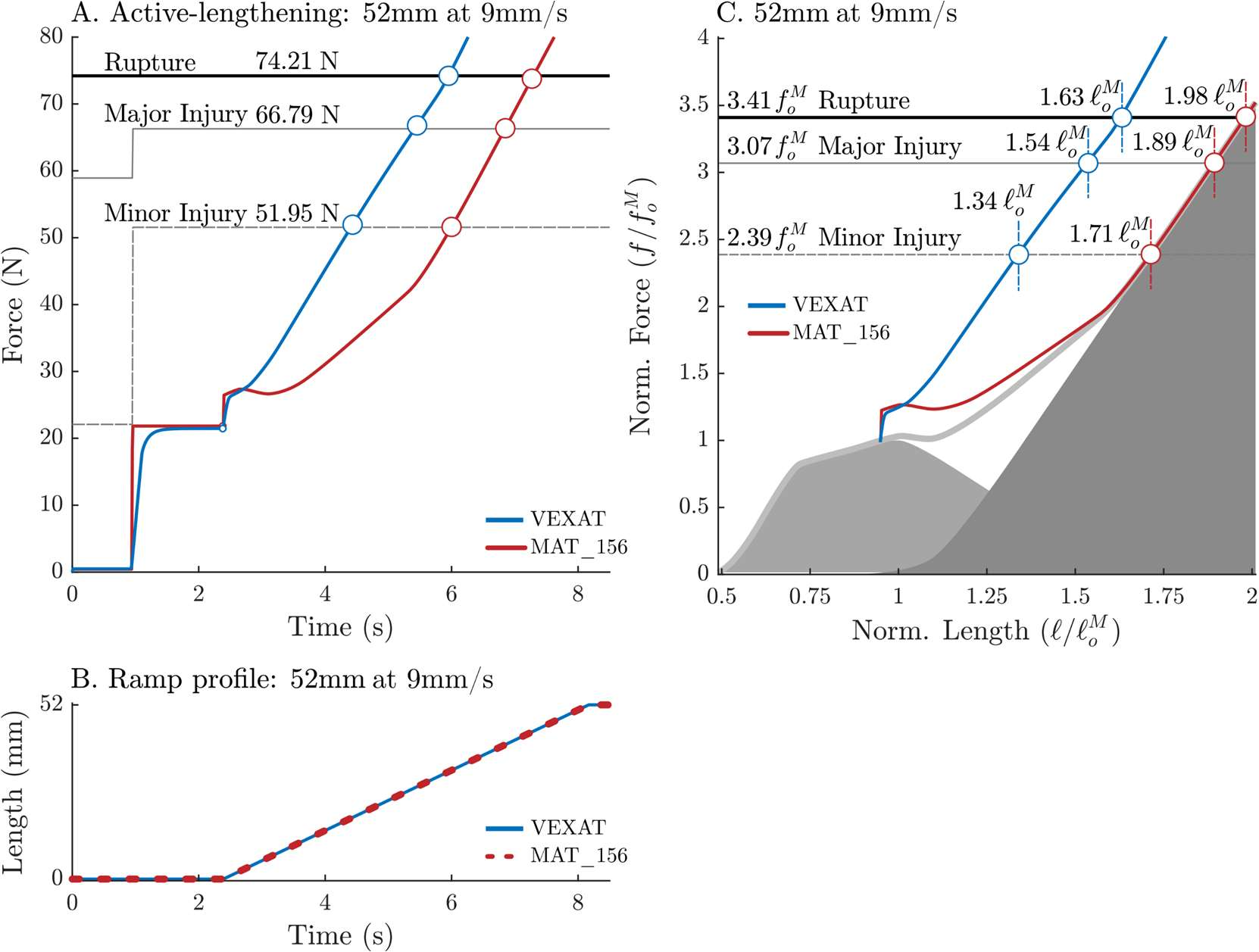
Improving the accuracy of musculotendon models for the simulation of active lengthening (2023) (paper)(pdf)
A reduced muscle model and planar musculoskeletal model fit for the simulation of whole body movements (2019) (paper)(pdf) (code: rbdl/addons/muscle)
Flexing Computational Muscle: Modeling and Simulation of Musculotendon Dynamics (2013)(paper)(pdf) (Matlab code) (OpenSim: OpenSim/Actuators/Millard2012EquilibriumMuscle.h)
(back)Muscle: modelling applications
Behavioral Motor Performance (2023) (paper)(pdf)
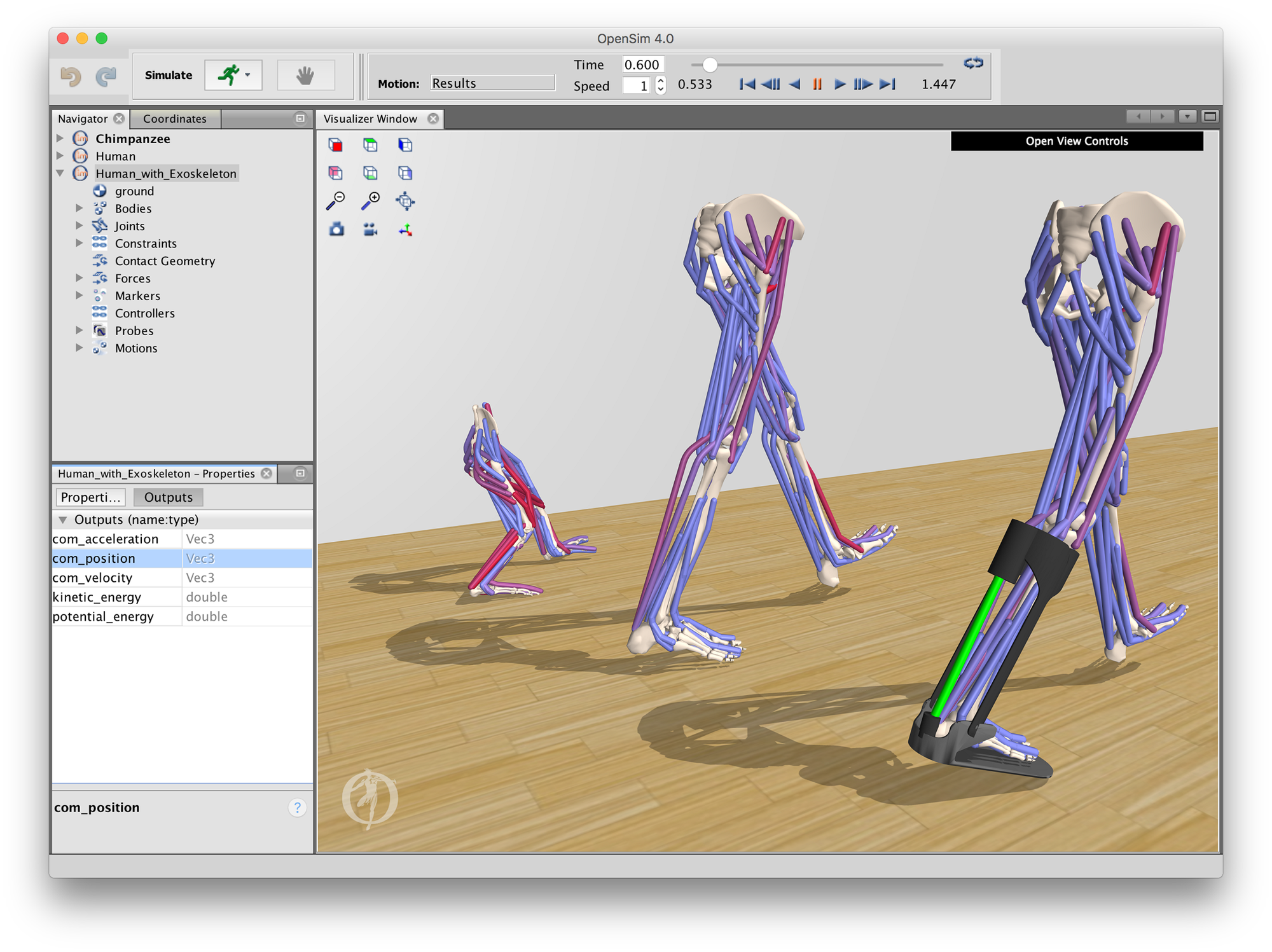
OpenSim: simulating musculoskeletal dynamics and neuromuscular control to study human and animal movement (2018) (paper)(pdf) (code)
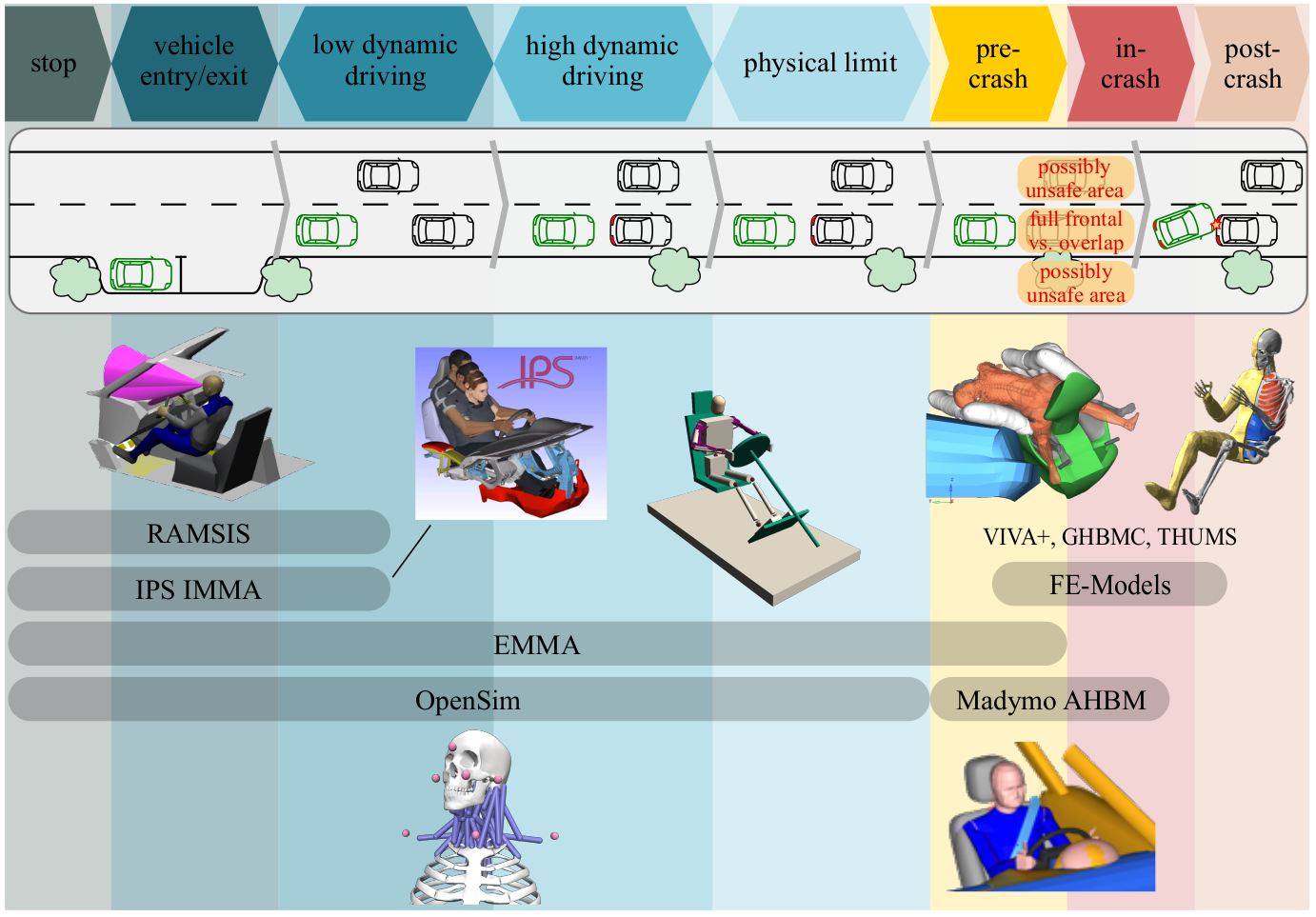
Dynamic human body models in vehicle safety: An overview (2023) (paper)(pdf)
(back)Muscle: experiments
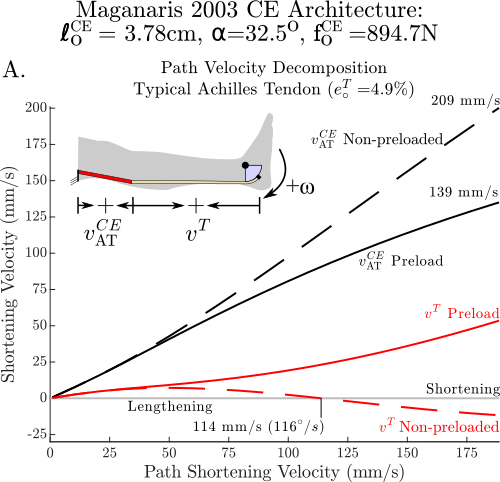
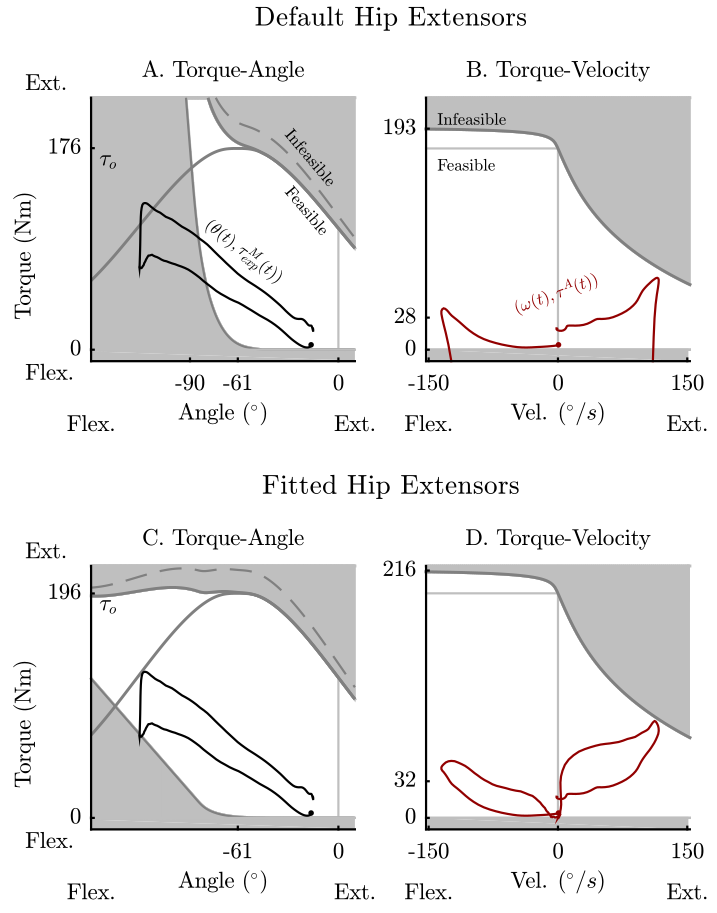
Achilles tendon compliance and preload determines the shape of the torque-angular velocity relation (2023) (paper)(pdf)
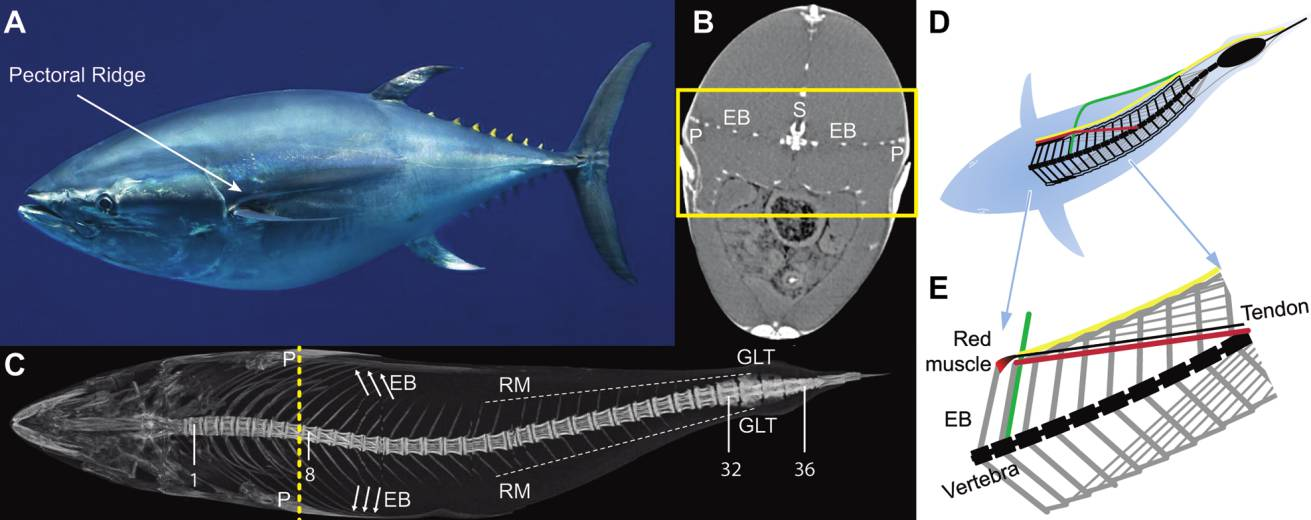
Biomechanical analysis of the slow-twitch (red) muscle force transmission pathways in tunas (2020) (paper)(pdf)
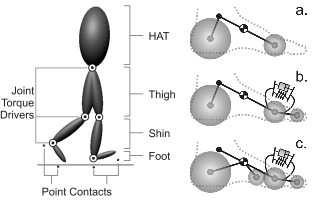
(back)Accurate models of foot-ground contact are important to accurately simulate legged locomotion.
Additional details
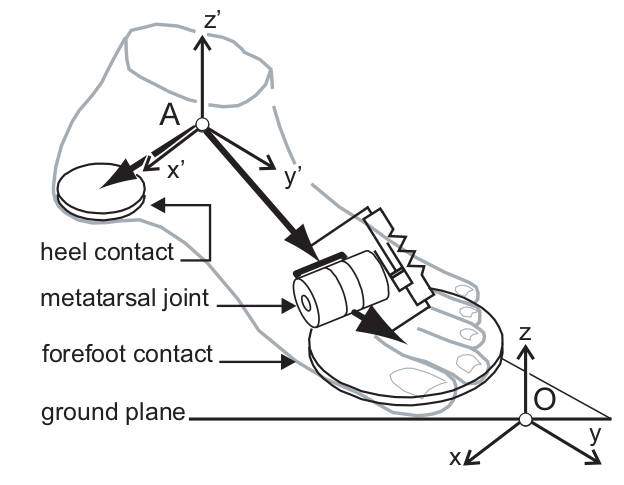
There is a real art to developing foot ground contact models that must be accurate, but also computationally efficient because these models are often only a part of a much larger simulation. This is why you will see my foot models use
- elastic spheres
- discs
- rigid ellipses
- and rigid circles.
In the future I'd like to try the pressure field method of Elandt et al. (paper) and maybe also a coarse-grained finite element model.
A quick turn of foot: rigid foot-ground contact models for human motion prediction (2019) (paper) See the supplementary material (url) the foot model code. (pdf)
A 3D foot-ground model using disk contacts (2015) (paper)(pdf)(code)
Multi-Step Forward Dynamic Gait Simulation (2009) (paper)(pdf)
(back)This work focuses on using simulation and experiment to evaluate the effectiveness of assistive devices
(back)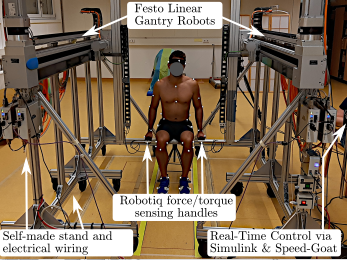
Experimental evaluation of preferred sit-to-stand assitance profiles of younger and older adults (in progress) (url)
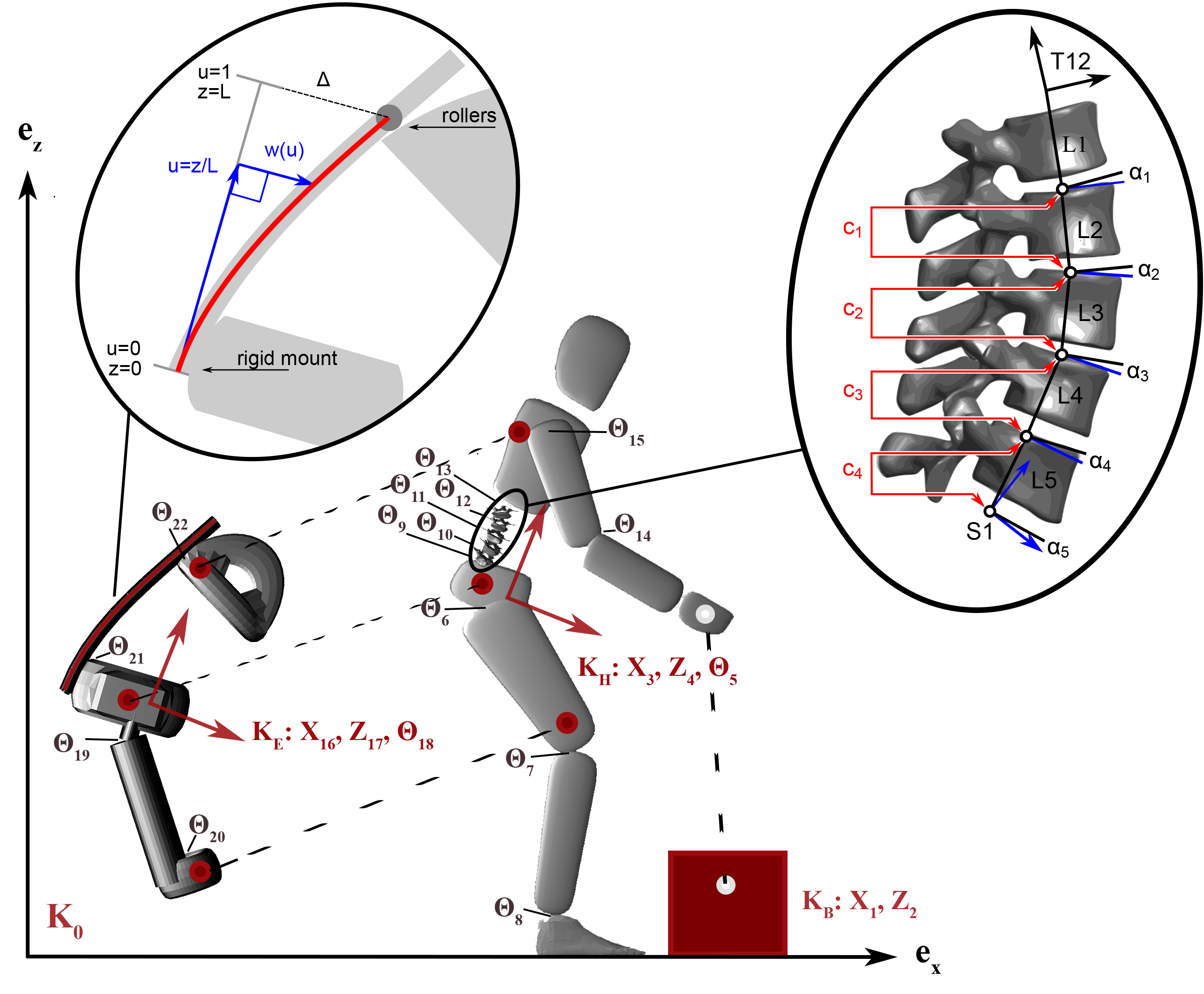
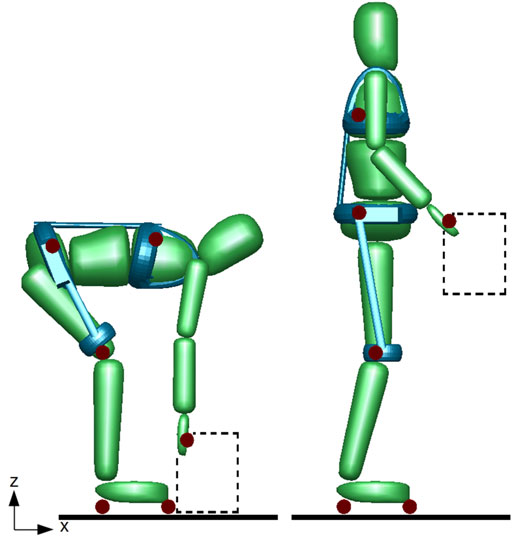
Comparing the risk of low-back injury using simulation: improved technique vs. exoskeleton assistance (2021) (paper)(pdf)
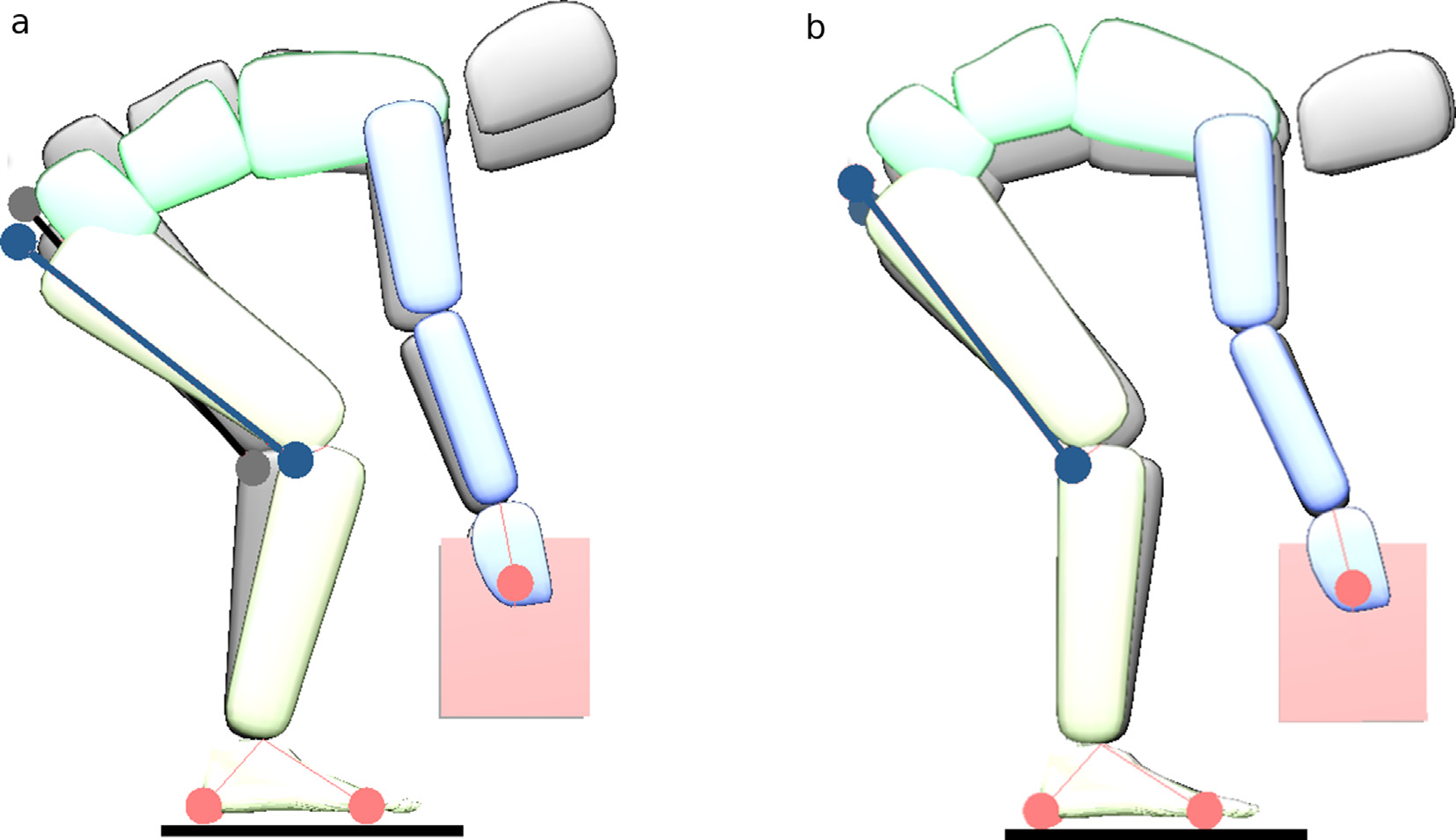
Predicting the influence of hip and lumbar flexibility on lifting motions using optimal control (2018) (paper)(pdf)
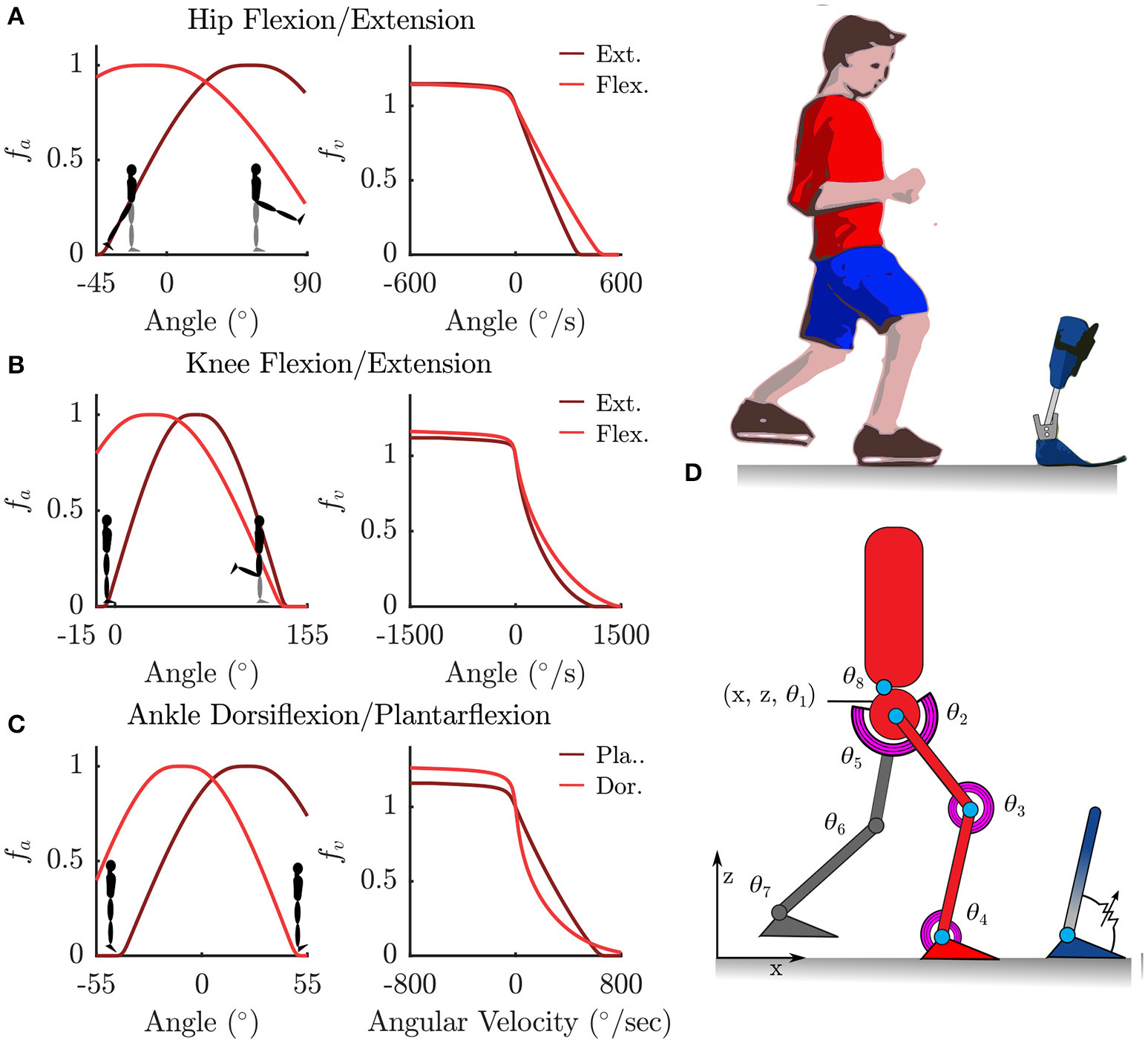
Optimal control based stiffness identification of an ankle-foot orthosis using a predictive walking model (2017) (paper)(pdf)(YouTube)
Model optimization and parameter identification for a human and lower back exoskeleton model (2017) (paper)(pdf)
Predicting the motions and forces of wearable robotic systems using optimal control (2017) (paper)(pdf)
(back)This work focuses on using simulation to analyze or synthesize bipedal locomotion
(back)Locomotion: experimental analysis
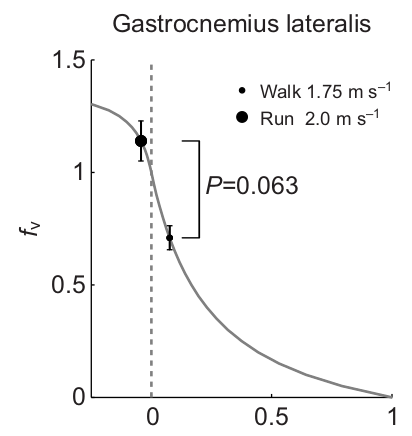
How muscle fiber lengths and velocities affect muscle force generation as humans walk and run at different speeds (2013) (paper)(pdf)
(back)Locomotion: synthesis
A reduced muscle model and planar musculoskeletal model fit for the simulation of whole body movements (2019) (paper)(pdf)(code: rbdl/addons/muscle)
Optimal control based stiffness identification of an ankle-foot orthosis using a predictive walking model (2017) (paper)(pdf)
Multi-Step Forward Dynamic Gait Simulation (2009) (paper)(pdf)
(back)Locomotion: simple models
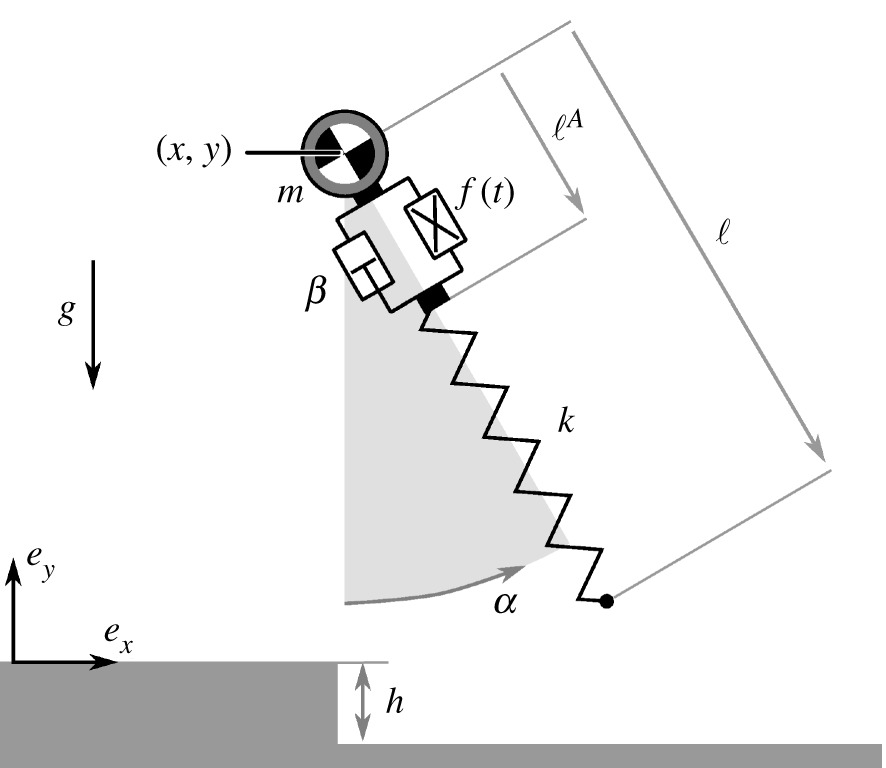
A little damping goes a long way: simulation study of how damping influences task-level stability in running (2020) (paper)(pdf)
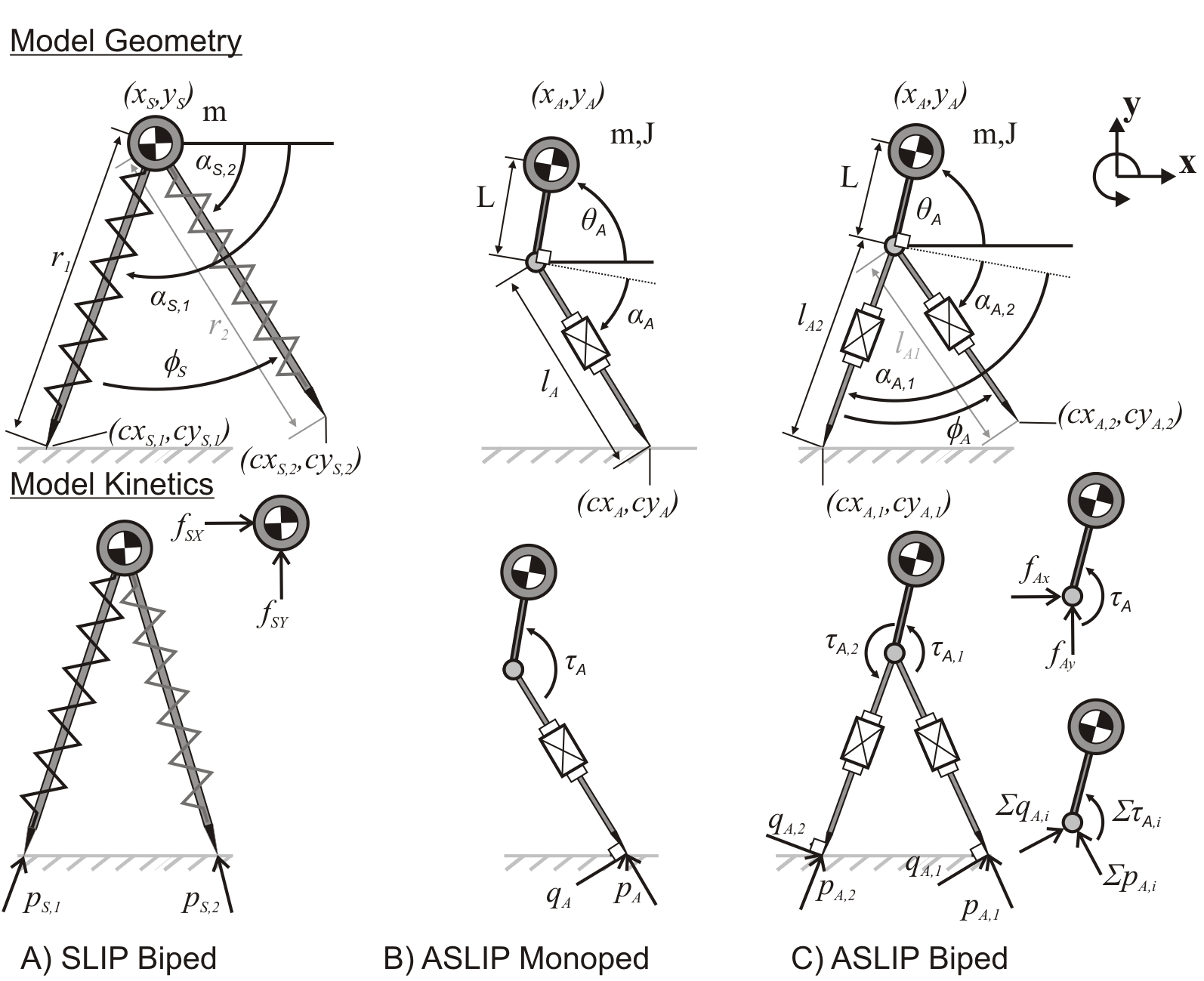
Forward dynamic human gait simulation using a SLIP target model (2010) (paper)(pdf)
(back)This projects lie at the intersection of disparate disciplines, wonderful people, and serendipity. It's been a while since I've visited that space, and I'd like to go back sometime soon.
(back)
Biomechanical analysis of the slow-twitch (red) muscle force transmission pathways in tunas (2020) (paper)(pdf)
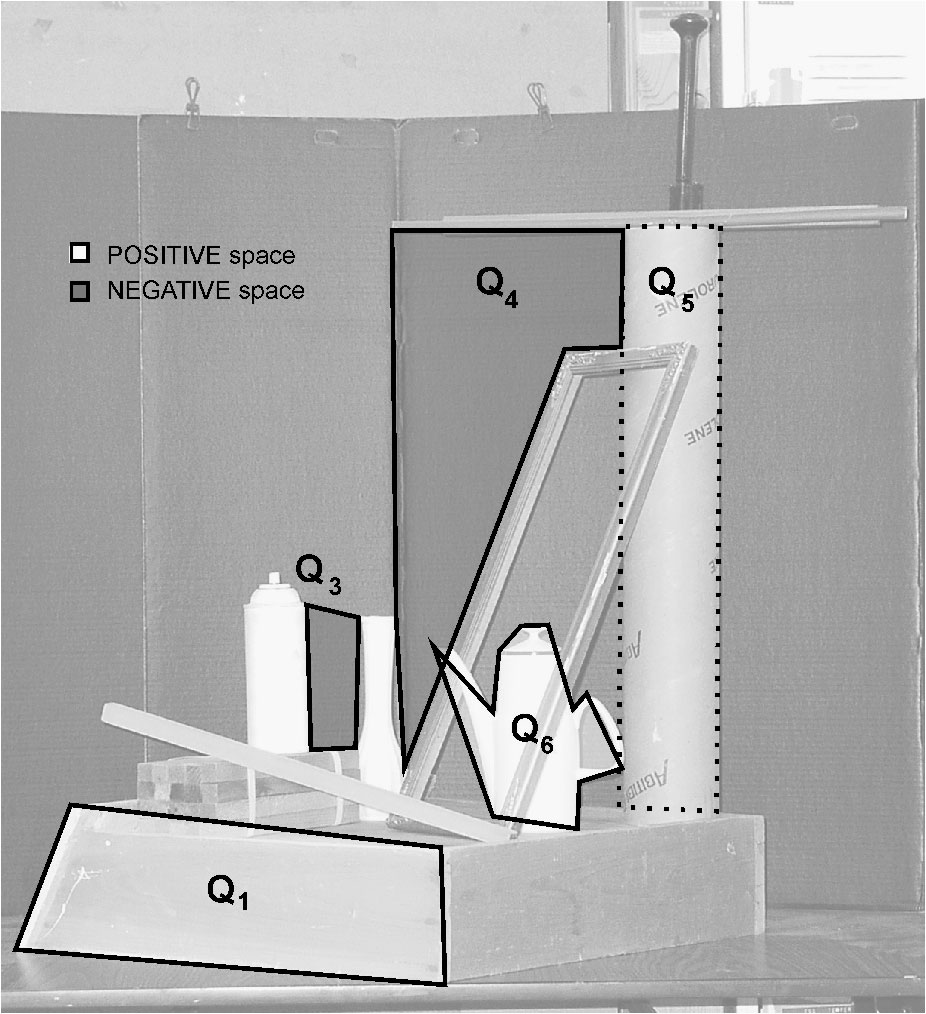
Polygon-based drawing accuracy analysis and positive/negative space (2014) (paper) (pdf)
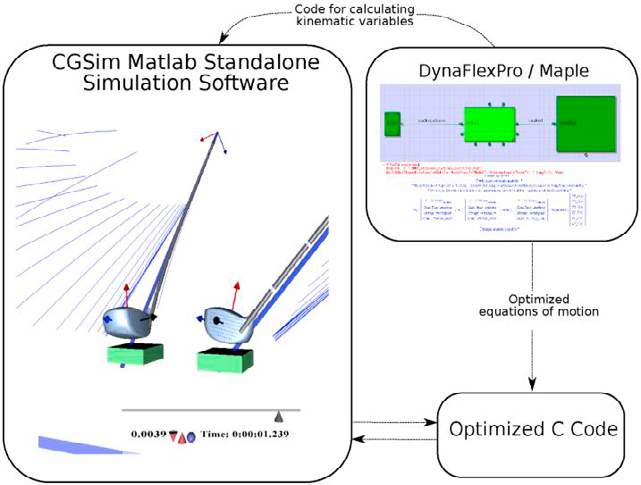
3D dynamic modelling and simulation of a golf drive (2010) (paper)(pdf)

Tuning pianos using reinforcement learning (2006) (paper)(pdf) (award)
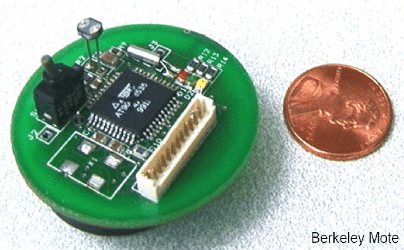
Sizzle: A standards-based end-to-end security architecture for the embedded Internet (2005) (paper)(pdf)
(back)





